연구
- • Web-based 3DGS 장면 스트리밍
- • WebXR-based 로봇 원격제어와 디지털트윈 인터페이스
- • 로봇 실험 데이터 수집과 GPU 서버 운영
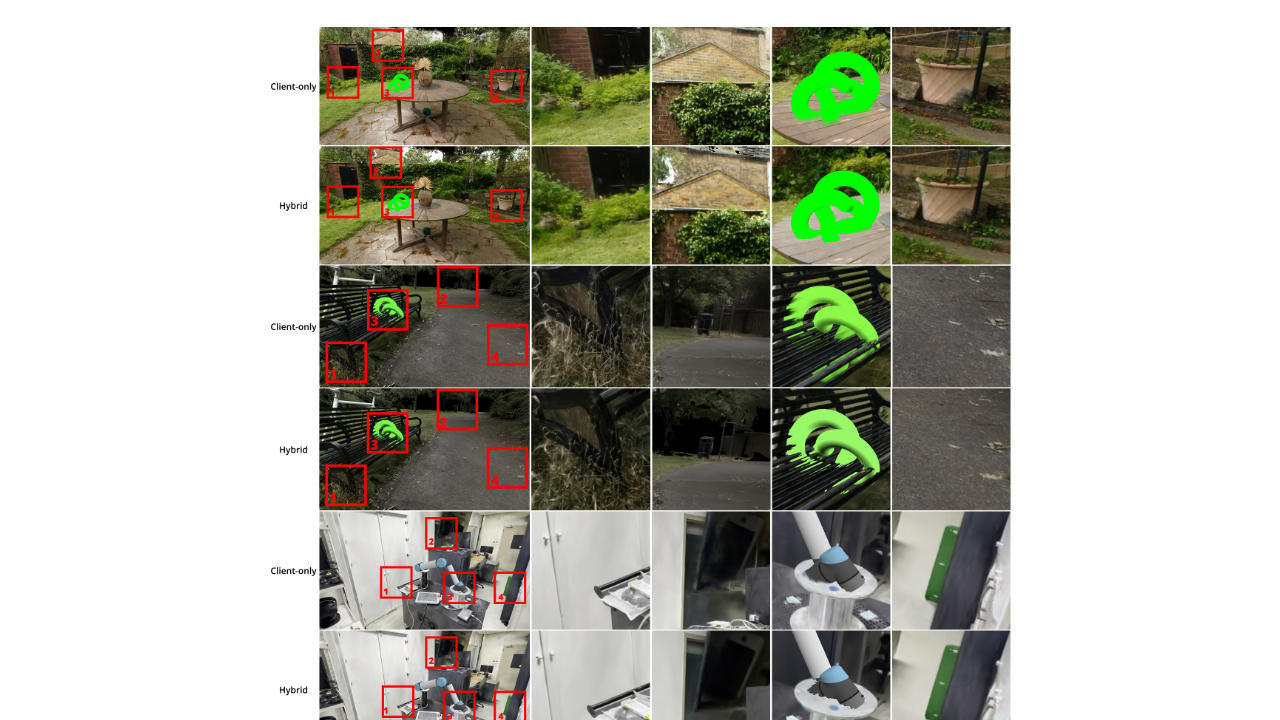
웹에서 3DGS 장면을 color/depth 스트림으로 다루고, 깊이 정보를 이용해 Gaussian과 mesh를 함께 렌더링합니다.
원본 영상과 재현 영상을 비교해 침해 판단 근거를 생성하는 실험을 만들었습니다.
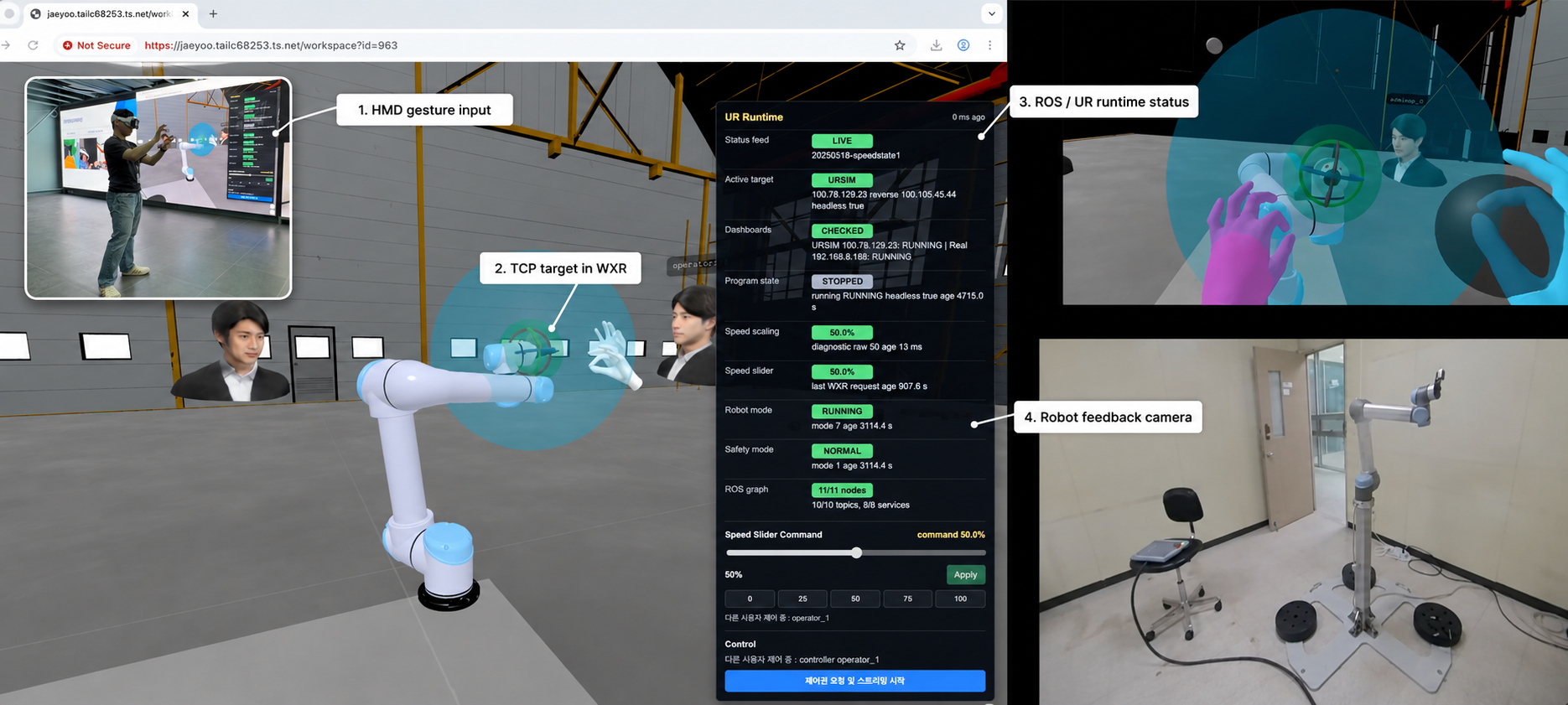
WebXR 화면에서 로봇 TCP pose, 카메라 피드, 디지털트윈 장면을 함께 보며 산업용 로봇을 원격 제어합니다.
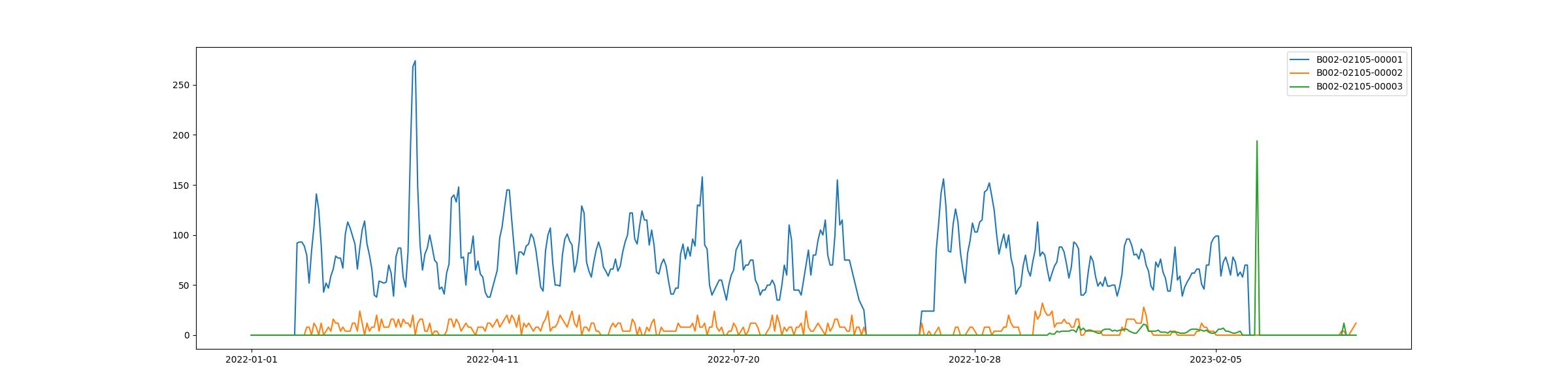
제품 계층과 검색량 데이터를 함께 보고 LSTM 기반 온라인 판매량 예측을 실험했습니다.