Overview
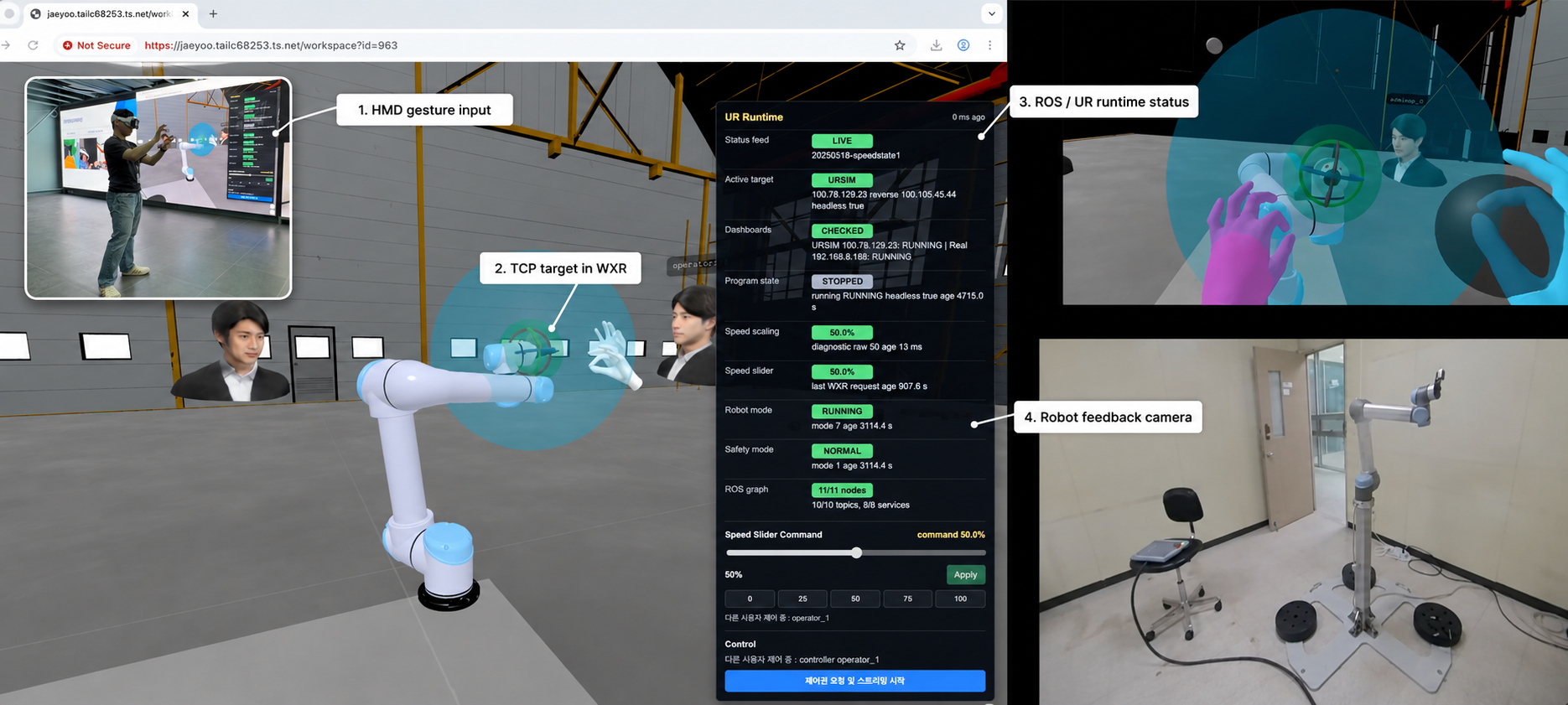
Robot Telekinesis is a WebXR-based remote robot-control system built around the spatial context of a digital twin. It explores how an operator can understand, view, and control a collaborative robot through web-native XR interfaces.
Research context
The project sits inside a broader Webized XR / WXR Platform research direction: browser-accessible XR interfaces, ROS2-connected digital twins, synchronized robot state, TCP pose visualization, and user interaction logging for future Physical AI data pipelines.
System components
- WebXR robot teleoperation interface.
- ROS2-connected digital-twin workflow.
- TCP pose and robot-state synchronization.
- Spatial-context views for comparing remote-operation interface designs.
- Demonstration-data collection for policy-learning workflows.
Recognition
The work contributed to multiple Korean CDE Society presentations, including award-winning poster work on view-interface comparison and WebXR-based remote robot control with digital-twin context.
Role
I developed WebXR teleoperation interfaces, integrated digital-twin state synchronization, and iterated on interaction/view designs for remote robot operation.
Materials
The local demo clips show the WebXR/digital-twin teleoperation interface in motion across several interaction and view states.